1. Einleitung
Unter Jitter versteht man die zeitlichen Abweichungen einer Reihe von Signalflanken von ihren Idealwerten. Jitter in Taktsignalen werden typischerweise durch Rauschen oder andere Störungen im System verursacht. Zu den beitragenden Faktoren gehören thermisches Rauschen, Schwankungen der Stromversorgung, Lastbedingungen, Geräterauschen und Störungen, die von nahegelegenen Schaltkreisen ausgehen.
2. Arten von Jitter
Jitter kann auf verschiedene Arten gemessen werden; Im Folgenden sind die wichtigsten Arten von Jitter aufgeführt:
- Perioden-Jitter
- Zyklus-zu-Zyklus-Perioden-Jitter
- Langfristiger Jitter
- Phasenjitter
- Zeitintervallfehler (TIE)
2.1 Perioden-Jitter
Periodenjitter ist die Abweichung der Zykluszeit eines Taktsignals von der idealen Periode über eine Anzahl zufällig ausgewählter Zyklen. Wenn uns eine Anzahl einzelner Taktperioden gegeben wäre, können wir jede einzelne messen und die durchschnittliche Taktperiode sowie die Standardabweichung und den Spitze-zu-Spitze-Wert berechnen. Die Standardabweichung und der Spitze-zu-Spitze-Wert werden häufig als RMS-Wert bzw. Pk-Pk-Perioden-Jitter bezeichnet.
In vielen Veröffentlichungen wurde Periodenjitter als die Differenz zwischen einer gemessenen Taktperiode und der idealen Periode definiert. In realen Anwendungen ist es oft schwierig, den idealen Zeitraum zu quantifizieren. Wenn wir den Ausgang eines auf 100 MHz eingestellten Oszillators mit einem Oszilloskop betrachten, kann die durchschnittliche gemessene Taktperiode 9,998 ns statt 10 ns betragen. Daher ist es in der Regel praktischer, den Durchschnittszeitraum als idealen Zeitraum zu betrachten.
2.1.1 Perioden-Jitter-Anwendungen
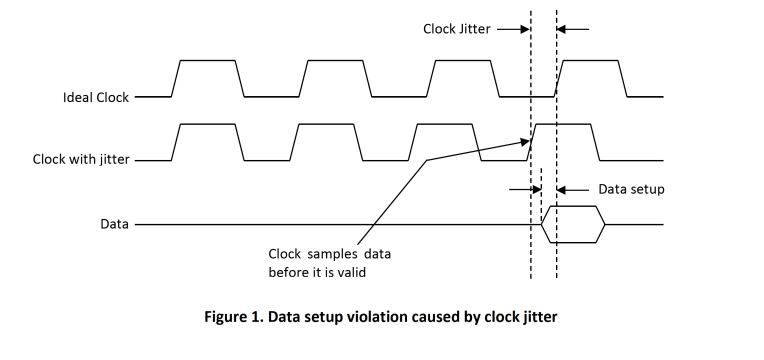
Periodenjitter ist nützlich bei der Berechnung von Zeitspannen in digitalen Systemen. Stellen Sie sich ein mikroprozessorbasiertes System vor, bei dem der Prozessor 1 ns Datenaufbau benötigt, bevor der Takt ansteigt. Wenn der Periodenjitter des Takts -1,5 ns beträgt, könnte die ansteigende Flanke des Takts auftreten, bevor die Daten gültig sind. Daher werden dem Mikroprozessor falsche Daten angezeigt. Dieses Beispiel ist in Abbildung 1 dargestellt.
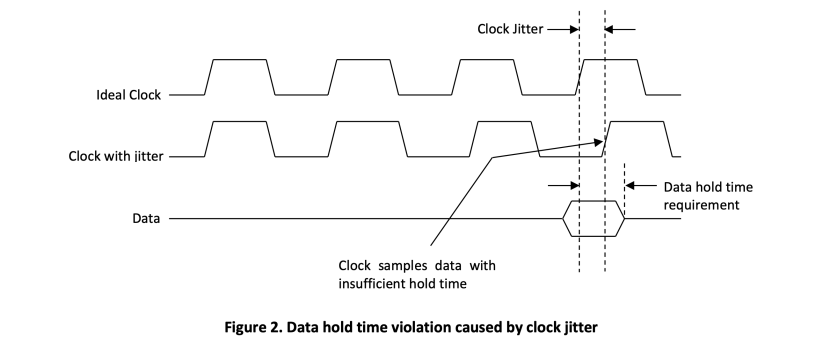
Wenn ein anderer Mikroprozessor eine Datenhaltezeit von 2 ns benötigt, der Taktjitter aber jetzt +1,5 ns beträgt, wird die Datenhaltezeit effektiv auf 0,5 ns reduziert. Auch hier werden dem Mikroprozessor falsche Daten angezeigt. Diese Situation ist in Abbildung 2 dargestellt.
2.1.2 Berechnung des Peak-to-Peak-Jitters aus dem RMS-Jitter
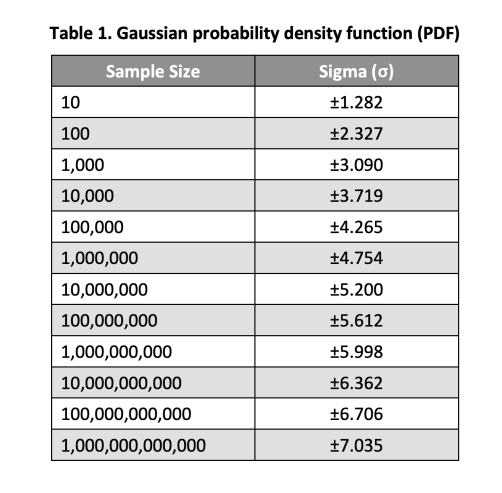
Da der Periodenjitter einer Uhr zufälliger Natur mit Gaußscher Verteilung ist, kann er vollständig durch seinen quadratischen Mittelwert (RMS) in Pikosekunden (ps) ausgedrückt werden. Der Spitze-zu-Spitze-Wert ist jedoch für die Berechnung der Einrichtungs- und Haltezeitbudgets relevanter. Um den RMS-Jitter in Spitze-Spitze-Jitter (Pk-Pk) für eine Stichprobengröße von 10.000 umzuwandeln, kann der Leser die folgende Gleichung verwenden:
𝑃𝑒𝑎𝑘‒ 𝑡𝑜‒ 𝑝𝑒𝑎𝑘 𝑝𝑒𝑟𝑖𝑜𝑑 𝑗𝑖𝑡𝑡𝑒𝑟 = ±3,719 𝑥 (𝑅𝑀𝑆 𝑗𝑖𝑡𝑡𝑒𝑟) Gleichung 1
Wenn der RMS-Jitter beispielsweise 3 ps beträgt, beträgt der Peak-to-Peak-Jitter ±11,16 ps.
Gleichung 1 wird aus der Tabelle der Gaußschen Wahrscheinlichkeitsdichtefunktion (PDF) abgeleitet. Wenn die Stichprobengröße beispielsweise 100 beträgt, liegen 99 dieser Stichproben innerhalb von ±2,327σ vom Mittelwert der Verteilung, im Durchschnitt liegt nur eine Stichprobe außerhalb dieses Bereichs. SiTime misst den RMS-Perioden-Jitter über eine Stichprobengröße von 10.000, wie im JEDEC-Standard angegeben.
2.1.3 Perioden-Jitter-Messmethode
Periodenjitter ist im JEDEC-Standard 65B als Abweichung der Zykluszeit eines Signals von der idealen Periode über eine Anzahl zufällig ausgewählter Zyklen definiert. Der JEDEC-Standard spezifizierte außerdem, dass Periodenjitter über eine Stichprobe von 10.000 Zyklen gemessen werden sollte. SiTime empfiehlt die Messung des Periodenjitters mit dem folgenden Verfahren:
- Messen Sie die Dauer (steigende Flanke zu steigender Flanke) eines Taktzyklus
- Warten Sie eine zufällige Anzahl von Taktzyklen
- Wiederholen Sie die oben genannten Schritte 10.000 Mal
- Berechnen Sie den Mittelwert, die Standardabweichung (σ) und die Spitze-zu-Spitze-Werte aus den 10.000 Proben
- Wiederholen Sie die oben genannten Messungen 25 Mal. Berechnen Sie aus den 25 Ergebnissätzen den durchschnittlichen Spitze-zu-Spitze-Wert.
Die Standardabweichung (σ) oder der RMS-Wert, der aus einer Messung von 10.000 Zufallsstichproben (Schritt 4) berechnet wird, ist ziemlich genau. Der Fehler im RMS-Wert kann mit der folgenden Gleichung berechnet werden:

Dabei ist σn der RMS (oder Sigma) der gesammelten Stichprobe und N die Stichprobengröße. Bei einer Stichprobengröße von 10.000 beträgt ErrorRMS 0,0071σn. Dieser Fehler ist zufällig und folgt der Gaußschen Verteilung. Der Messfehler im ungünstigsten Fall wird typischerweise mit ±3 ErrorRMS berechnet.
Wenn beispielsweise der aus 10.000 Zufallsstichproben berechnete RMS-Wert 10 ps beträgt, beträgt der ErrorRMS 0,071 ps und praktisch alle RMS-Werte dieser Messung liegen immer noch in einem engen Bereich von 10 ± 0,213 ps. In praktischen Anwendungen sind die RMS-Fehler in einem Stichprobensatz von 10.000 klein genug, um ignoriert zu werden.
Während ein genauer RMS-Wert aus einem zufälligen Satz von 10.000 Stichproben berechnet werden kann, ist der Spitze-zu-Spitze-Wert schwieriger zu messen. Aufgrund der zufälligen Natur des Periodenjitters ist die Wahrscheinlichkeit, Datenpunkte am anderen Ende der Verteilungskurve zu erfassen, umso höher, je größer die Stichprobengröße ist. Mit anderen Worten: Der Spitze-zu-Spitze-Wert divergiert statt zu konvergieren, je mehr Proben erfasst werden. Aus diesem Grund haben wir einen zusätzlichen Schritt, Schritt 5, hinzugefügt, um eine konsistentere und wiederholbare Spitze-zu-Spitze-Messung zu erzielen.
Jede Messung von 10.000 Zufallsstichproben (Schritt 4) ergibt einen Standardabweichungswert und einen Spitze-zu-Spitze-Wert. Indem wir diesen Vorgang 25 Mal zufällig wiederholen, könnten wir einen guten Satz Datenpunkte sammeln, aus denen wir den durchschnittlichen Spitze-zu-Spitze-Wert mit einem hohen Maß an Genauigkeit berechnen können. Wir können aus diesen Daten auch den durchschnittlichen RMS-Wert berechnen, dieser wird jedoch sehr nahe am RMS-Wert liegen, der aus jedem einzelnen Lauf ermittelt wird.
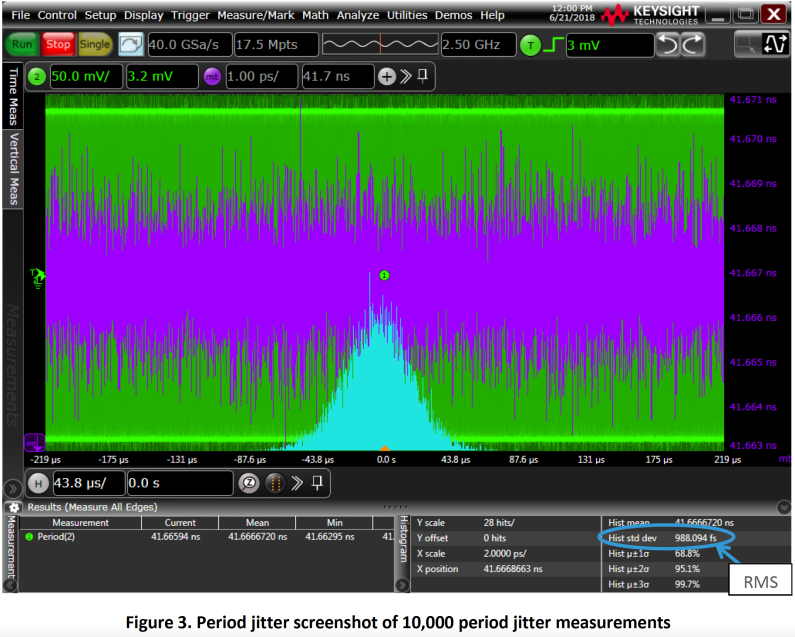
Abbildung 3 ist das Perioden-Jitter-Histogramm und der Periodentrend eines 3,3-V-TCXO-Oszillators mit 24 MHz, aufgenommen mit dem Infiniium-Hochleistungsoszilloskop DSA90804A. Es stellt einen Satz RMS-Werte dar, der aus 10.000 Proben gemessen wurde (Schritt 4).
2.2 Zyklus-zu-Zyklus-Jitter
Zyklus-zu-Zyklus-Jitter (C2C) ist im JEDEC-Standard 65B als Variation der Zykluszeit eines Signals zwischen benachbarten Zyklen über eine Zufallsstichprobe benachbarter Zykluspaare definiert. Der JEDEC-Standard spezifizierte außerdem, dass jede Stichprobengröße größer oder gleich 1.000 sein sollte. Bitte beachten Sie, dass der Jitter von Zyklus zu Zyklus nur den Periodenunterschied zwischen zwei aufeinanderfolgenden Zyklen betrifft, es gibt keinen Bezug zu einem idealen Zyklus.
Zyklus-zu-Zyklus-Jitter wird typischerweise als Spitzenwert in ps angegeben, der die maximale Abweichung zwischen den ansteigenden Flanken zweier aufeinanderfolgender Takte definiert. Diese Art der Jitter-Spezifikation wird häufig verwendet, um die Stabilität von Spread-Spectrum-Takten zu veranschaulichen, da der Perioden-Jitter empfindlicher auf die Frequenzspreizungsfunktion reagiert, während dies bei C2C-Jitter nicht der Fall ist. Zyklus-zu-Zyklus-Jitter wird manchmal auch als RMS-Wert in ps ausgedrückt.
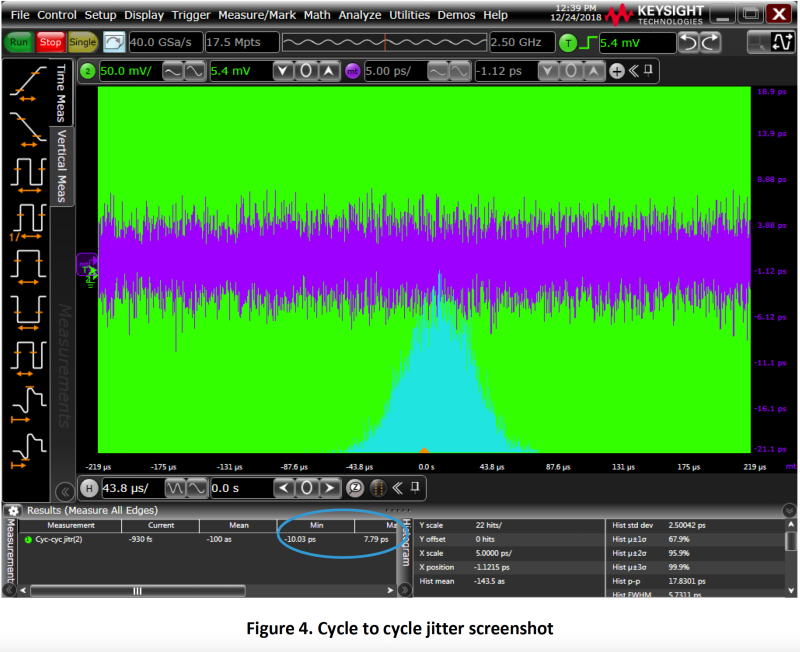
2.2.1 Zyklus-zu-Zyklus-Jitter-Messmethode
SiTime empfiehlt die Messung von Zyklus-zu-Zyklus-Jitter mit dem folgenden Verfahren:
- Messen Sie die Zykluszeiten zweier benachbarter Taktzyklen T1 und T2
- Berechnen Sie den Wert von T1-T2. Notieren Sie den absoluten Wert dieser Zahl.
- Warten Sie eine zufällige Anzahl von Taktzyklen
- Wiederholen Sie die oben genannten Schritte 1.000 Mal
- Berechnen Sie die Standardabweichung (σ) und den Spitzenwert aus den 1.000 Proben. Der Spitzenwert ist die größte absolute Zahl (T1-T2) im Datensatz.
- Wiederholen Sie die obigen Messungen 25 Mal und berechnen Sie den durchschnittlichen Spitzenwert aus den 25 Ergebnissätzen.
Ähnlich wie beim Spitze-zu-Spitze-Perioden-Jitter divergiert auch der Spitzenwert des Zyklus-zu-Zyklus-Jitters, anstatt zu konvergieren, je mehr Abtastwerte erfasst werden. Schritt 6 des Verfahrens wird hinzugefügt, um den durchschnittlichen Spitzen-C2C-Jitter aus 25 Probensätzen zu ermitteln.
Abbildung 4 ist ein Beispiel für das Zyklus-zu-Zyklus-Jitter-Histogramm und den Periodentrend. In diesem Fall beträgt der maximale Zyklus-zu-Zyklus-Jitter 10,03 ps (die größere der beiden Zahlen: -10,03 ps und 7,79 ps, ausgedrückt in absoluter Form).
2.3 Langfristiger Jitter
Der Langzeit-Jitter misst die Veränderung der Taktausgabe von der Idealposition über mehrere aufeinanderfolgende Zyklen. Die tatsächliche Anzahl der bei der Messung verwendeten Zyklen ist anwendungsabhängig. Langzeit-Jitter unterscheidet sich von Perioden-Jitter und Zyklus-zu-Zyklus-Jitter, da er die kumulative Wirkung von Jitter auf einen kontinuierlichen Strom von Taktzyklen über einen langen Zeitraum darstellt. Aus diesem Grund wird Langzeit-Jitter manchmal als akkumulierter Jitter bezeichnet. Langfristiger Jitter ist typischerweise bei Grafik-/Videoanzeigen und Telemetrieanwendungen mit großer Reichweite wie Entfernungsmessern nützlich.
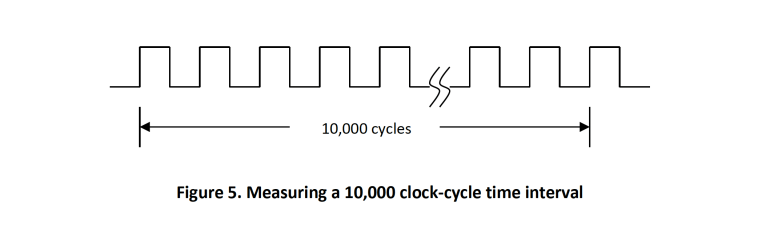
SiTime empfiehlt die Messung des Langzeit-Jitters mit der folgenden Methode: In diesem Beispiel messen wir den Langzeitjitter über 10.000 Takte.
- Messen Sie das Zeitintervall von 10.000 aufeinanderfolgenden Taktzyklen, wie in Abbildung 5 dargestellt
- Warten Sie eine zufällige Anzahl von Taktzyklen
- Wiederholen Sie die oben genannten Schritte 1.000 Mal
- Berechnen Sie den Mittelwert, die Standardabweichung (σ) und die Spitze-zu-Spitze-Werte aus den 1.000 Proben
- Wiederholen Sie die obigen Messungen 25 Mal. Berechnen Sie aus den 25 Ergebnissätzen den durchschnittlichen Spitze-zu-Spitze-Wert.
Auch hier ist Schritt 5 erforderlich, um die Unbegrenztheit des Spitze-zu-Spitze-Werts zu überwinden.
2.4 Phasenjitter
Phasenrauschen wird normalerweise entweder als eine Reihe von Rauschwerten bei verschiedenen Frequenzoffsets (z. B. -60 dBc/Hz bei 20 kHz und -95 dBc/Hz bei 10 MHz) oder als kontinuierliche Rauschkurve über einen Frequenzbereich beschrieben. Phasenjitter ist die Integration von Phasenrauschen über ein bestimmtes Spektrum und wird in Sekunden ausgedrückt.
Bei einer Rechteckwelle liegen die meisten Energien bei der Trägerfrequenz. Allerdings werden einige Signalenergien über einen Frequenzbereich auf beiden Seiten des Trägers „durchgesickert“. Phasenjitter ist die Menge an Phasenrauschenergie, die zwischen zwei versetzten Frequenzen relativ zum Träger (fc) enthalten ist. Abbildung 6 ist ein Diagramm des ungefilterten Phasenrauschens und die schattierten Bereiche stellen den Phasenjitter zwischen den Frequenzen f1 und f2 dar.
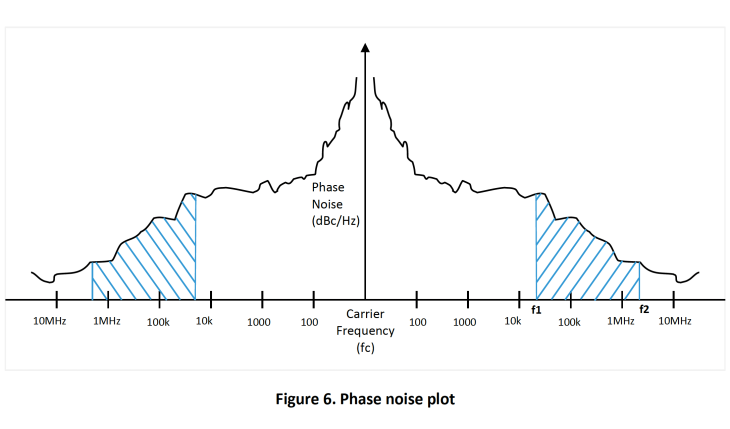
Der RMS-Phasenjitter zwischen f1 und f2 wird durch Gleichung 3 definiert.
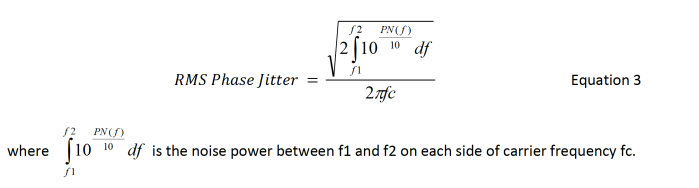
In Kommunikationsanwendungen wird der Bandpassfiltereffekt der kombinierten TX-PLL und RX-PLL auf die Rohdaten des Phasenrauschens angewendet, bevor der endgültige RMS-Phasenjitterwert berechnet wird. Im Folgenden sind gängige Anwendungen und die Bandbreite (Eckfrequenzen) der zugehörigen Filter aufgeführt:
- SONET OC-48: 12 kHz bis 20 MHz
- Fibre Channel: 637 kHz bis 10 MHz
- SATA/SAS: 900 kHz bis 7,5 MHz
- 10 Gigabit Ethernet XAUI: 1,875 MHz bis 20 MHz
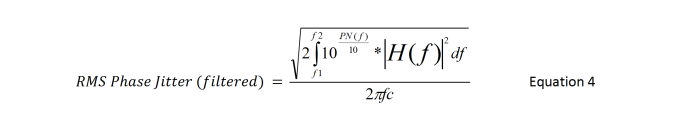
Wenn die Filterfunktion H(f) ist, kann der gefilterte RMS-Phasenjitter mit Gleichung 4 berechnet werden.
2.5 Zeitintervallfehler (TIE)
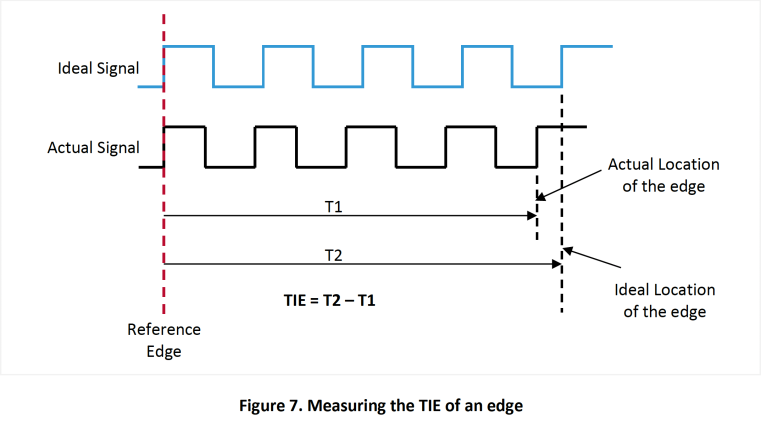
Der Zeitintervallfehler (TIE) einer Kante ist die zeitliche Abweichung dieser Kante von ihrer idealen Position, gemessen von einem Referenzpunkt. Tatsächlich ist TIE die diskrete Zeitbereichsdarstellung des Phasenrauschens, ausgedrückt in Sekunden oder Pikosekunden. Abbildung 7 veranschaulicht das Grundkonzept von TIE. Das ideale Signal ist oft ein Signal, das in der Software aus einer durchschnittlichen Schätzung der Signalperiode erstellt wird.
2.5.1 TIE über die Zeit darstellen
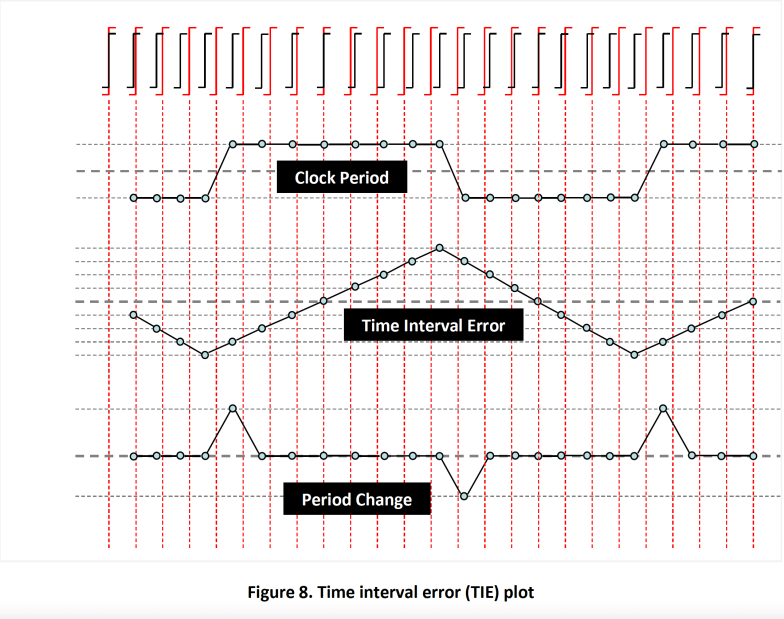
Oben in Abbildung 8 ist eine Taktwellenform dargestellt. Die roten Impulse sind perfekt getimte Taktzyklen mit einer Dauer von genau 1000 ps. Die schwarzen Impulse sind Taktzyklen mit Jitter. Die Hinterflanken dieser Taktimpulse wurden entfernt, um die Darstellung zu verbessern. Zu Beginn der Sequenz sind sowohl die rote als auch die schwarze Uhr aufeinander ausgerichtet. Aufgrund des Jitters beginnen sich die schwarzen Taktflanken zeitlich zu verschieben, manchmal vor der roten Taktflanke und manchmal danach.
Der Plot mit der Bezeichnung „Clock Period“ stellt die gemessenen schwarzen Taktperioden im Zeitverlauf dar. In diesem Beispiel betragen die schwarzen Taktperioden entweder 990 ps oder 1010 ps. Das Diagramm „Periodenwechsel“ zeigt die Veränderung jedes Zyklus gegenüber dem vorherigen Zyklus. Dieser Graph bleibt flach, solange der Zeitraum zwischen zwei aufeinanderfolgenden schwarzen Uhren gleich bleibt. Es wird jedoch eine Änderung registriert, wenn eine Periodendifferenz erkannt wird.
Beispielsweise ist die Periode der ersten 4 Taktzyklen konstant bei 990 ps, sodass das Diagramm „Periodenwechsel“ flach ist; Wenn jedoch die Periode des fünften Takts von 990 ps auf 1010 ps verlängert wird, meldet das Diagramm diese Änderung, indem es zur Position +20 ps springt. Mit anderen Worten: Dieses Diagramm identifiziert die Periodenänderungen, die im Diagramm „Uhrzeit“ angezeigt werden.
Das Diagramm „Time Interval Error“ (TIE) dokumentiert den akkumulierten Fehler zwischen der idealen Kante (rote Uhr) und der tatsächlichen Kante (schwarze Uhr). In diesem Beispiel bewegt sich das TIE-Diagramm zunächst in die negative Richtung, da die ersten vier Takte jeweils 10 ns kürzer als die ideale Periode sind. Nachdem sich der Jitter-Fehler um -40 ps angesammelt hat, ändert die Darstellung beim fünften Takt die Richtung und bewegt sich in die positive Richtung, da die fünfte Taktperiode 10 ps länger als die ideale Periode ist.
TIE-Messungen sind besonders nützlich, wenn das Verhalten übertragener Datenströme untersucht wird, bei denen der Referenztakt typischerweise mithilfe einer Clock/Data Recovery (CDR)-Schaltung aus dem Datensignal wiederhergestellt wird. Ein großer TIE-Wert kann darauf hinweisen, dass die PLL im CDR zu langsam auf die sich ändernde Bitrate des Datenstroms reagiert.
3. Jitter-Messungen mit einem Echtzeit-Digitaloszilloskop
3.1 Richtlinien zur Oszilloskop-Einrichtung
Das am häufigsten zur Messung des Taktjitters verwendete Instrument ist das Echtzeit-Digitaloszilloskop (Oszilloskop). Dieser Abschnitt enthält allgemeine Richtlinien zur Oszilloskopeinrichtung, um eine bessere Genauigkeit der Jitter-Messung zu erzielen.
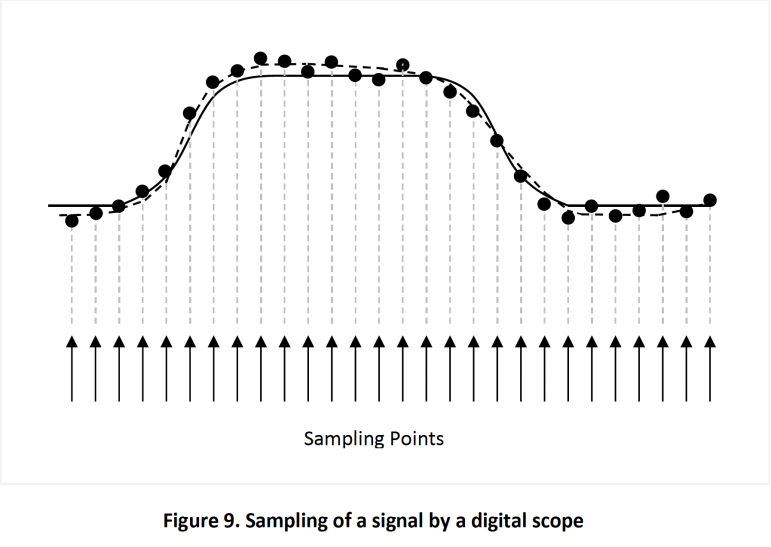
Das digitale Oszilloskop nutzt eine interne Zeitbasis, um seine Eingaben in regelmäßigen Abständen abzutasten. Die Abtastrate kann zwischen 1 Gsps (Giga-Samples pro Sekunde) und 40 Gsps bei High-End-Geräten liegen. Abbildung 9 zeigt, wie das digitale Oszilloskop ein an seinen Eingängen anliegendes Signal abtastet und anzeigt. Die Pfeile am unteren Rand der Abbildung stellen die Abtastpunkte dar, die durchgezogene Linie ist das tatsächliche Signal und die Punkte sind die abgetasteten Werte. Das vom Oszilloskop angezeigte Signal (dargestellt durch die gepunktete Linie) ist die am besten geeignete Kurve über die abgetasteten Punkte.
Dem Leser fällt möglicherweise auf, dass die abgetasteten Werte nicht immer mit dem tatsächlichen Signal übereinstimmen. Diese Abweichungen werden durch Quantisierungsfehler im Oszilloskop verursacht. Die meisten dieser Fehler sind auf die Kompromisse zwischen Design und Kosten des Oszilloskops zurückzuführen, doch durch die richtige Einrichtung des Oszilloskops können einige der Ungenauigkeiten abgemildert werden. In den folgenden Abschnitten werden wir die Hauptursachen dieser Fehler untersuchen und Schritte empfehlen, um ihre Auswirkungen auf Jitter-Messungen zu reduzieren.
3.1.1 Rauschen des Frontend-Verstärkers
Die Eingänge eines digitalen Oszilloskops durchlaufen einen analogen Verstärker, bevor sie vom Analog-Digital-Wandler (ADC) digitalisiert werden. Das von diesem Verstärker erzeugte Rauschen ist proportional zur Eingangsbandbreite des Oszilloskops: Je größer die Bandbreite, desto höher das Rauschen. Eine zu starke Reduzierung der Bandbreite wirkt sich jedoch auf die Anstiegs- und Abfallzeit des abgetasteten Signals aus und führt somit zu erheblichen Fehlern bei der Jitter-Messung.
Die allgemeine Gleichung, die die Beziehung zwischen Anstiegszeit/Abfallzeit und der Bandbreite der Signalflanke beschreibt, lautet:

Dabei wird die Anstiegszeit (oder Abfallzeit) zwischen dem 20-%- und dem 80-%-Punkt der Signalflanke gemessen. SiTime empfiehlt, die Scope-Bandbreite auf das Dreifache der Bandbreite des Signals einzustellen. In einigen Bereichen kann die Bandbreite nur eingestellt werden, wenn die maximale Abtastrate ausgewählt ist. In anderen Bereichen ist die Bandbreite möglicherweise überhaupt nicht wählbar.
3.1.2 Quantisierungsrauschen aufgrund der vertikalen Verstärkungseinstellung
Der Quantisierungsfehler ist die Differenz zwischen dem abgetasteten Wert und dem tatsächlichen Wert des Signals am Abtastpunkt. Dieser Fehler ist in Abbildung 9 dargestellt. Ein Teil dieses Fehlers in einem Oszilloskop wird durch die vertikale Verstärkungseinstellung des Displays verursacht. Wenn die vertikale Verstärkung auf einen kleinen Wert eingestellt ist, nutzt das Oszilloskop möglicherweise nicht die volle Auflösung seines internen ADC.
SiTime empfiehlt, die vertikale Verstärkungsregelung des Oszilloskops anzupassen, bis das Signal die gesamte Höhe des Displays ausfüllt. Bei einigen Oszilloskopen könnte eine weitere Erhöhung der Vertikalverstärkung, sodass ein kleiner Teil des Signals sowohl am oberen als auch am unteren Rand des Displays abgeschnitten wird, den Quantisierungsfehler weiter reduzieren. Dieser Vorteil wird dadurch erreicht, dass die höhere vertikale Verstärkungseinstellung dazu führen kann, dass das Oszilloskop ein zusätzliches Bit im ADC verwendet, um das Signal zu digitalisieren. Diese Funktion ist jedoch vom Zielfernrohr abhängig. Bitte konsultieren Sie daher das Handbuch Ihres Zielfernrohrs.
3.1.3 Quantisierungsrauschen aufgrund niedriger Abtastrate
Ein Teil des im vorherigen Abschnitt beschriebenen Quantisierungsrauschens wird durch unzureichende Abtastpunkte entlang der horizontalen Achse verursacht. SiTime empfiehlt, mindestens 3 Abtastpunkte zu haben, die zwischen den 20 %- und 80 %-Punkten einer steigenden oder fallenden Flanke liegen. Diese Empfehlung führt zu einer Mindestanforderung an die Abtastrate für den Oszilloskop. Wenn beispielsweise die Anstiegszeit (20 % – 80 %) eines Signals 1 ns beträgt und innerhalb dieses Zeitrahmens 4 Abtastpunkte benötigt werden, muss das Oszilloskop eine Abtastrate von mehr als 4 Gsps haben. Wenn Ihr Oszilloskop eine höhere Abtastrate als die oben angegebene Mindestanforderung aufweist, wählen Sie die höchste Abtastrate.
3.1.4 Zeitbasis-Jitter
Die Abtastpunkte in einem digitalen Oszilloskop werden durch eine interne Zeitbasis generiert. Als Taktquelle hat die Zeitbasis ihre eigenen Jitter-Eigenschaften und trägt zum Jitter-Messfehler eines Signals bei. Im Allgemeinen sollte der Zeitbasis-Jitter unter 25 % des erwarteten Signal-Jitters gehalten werden, um eine Jitter-Messung mit einer Genauigkeit von mehr als 3 % zu ermöglichen. SiTime empfiehlt, für die Durchführung von Jitter-Messungen das beste in Ihrem Labor verfügbare Oszilloskop zu verwenden, da höherwertige Geräte in der Regel über bessere Zeitbasisschaltungen mit geringerem Jitter verfügen.
3.2 Jitter-Messverfahren mit einem digitalen Echtzeit-Oszilloskop
3.2.1 Messung des Periodenjitters
Methode A
- Konfigurieren Sie das Oszilloskop so, dass alle abgetasteten Taktperioden gemessen werden, anstatt nur den ersten Takt zu messen.
- Konfigurieren Sie das Oszilloskop so, dass es 10.000 Taktzyklen auf dem Bildschirm erfasst. Beispielsweise sind für einen 100-MHz-Takt 10.000 Zyklen = 100 us. Da die Anzeige normalerweise 10 horizontale Unterteilungen enthält, sollte die horizontale Steuerung auf 10 us pro Unterteilung eingestellt werden.
- Notieren Sie den Mittelwert, die Standardabweichung und die vom Oszilloskop gemeldeten Spitze-zu-Spitze-Werte.
- Die Werte für Mittelwert und Standardabweichung sind ziemlich genau. Der Peak-to-Peak-Wert ist jedoch aufgrund seiner Unbegrenztheit nicht sehr genau (siehe Abschnitt 2.1.3). Befolgen Sie den nächsten Schritt, um einen genaueren Spitze-zu-Spitze-Wert zu erhalten.
- Wiederholen Sie die Schritte 2 und 3 fünfundzwanzig (25) Mal. Notieren Sie den Spitze-zu-Spitze-Wert nach jedem Lauf und berechnen Sie den durchschnittlichen Spitze-zu-Spitze-Wert aus den 25 Ergebnissen.
Methode B (die JEDEC-Methode)
- Konfigurieren Sie das Oszilloskop so, dass es die Periode des ersten Takts misst, und aktivieren Sie die Histogrammfunktion, falls verfügbar.
- Konfigurieren Sie das Oszilloskop so, dass es einen einzelnen Taktzyklus auf dem Bildschirm erfasst.
- Wiederholen Sie den obigen Schritt 10.000 Mal.
- Notieren Sie den Mittelwert, die Standardabweichung und die vom Oszilloskop gemeldeten Spitze-zu-Spitze-Werte.
- Die Werte für Mittelwert und Standardabweichung sind ziemlich genau. Der Peak-to-Peak-Wert ist jedoch aufgrund seiner Unbegrenztheit nicht sehr genau (siehe Abschnitt 2.1.3). Befolgen Sie den nächsten Schritt, um einen genaueren Spitze-zu-Spitze-Wert zu erhalten.
- Wiederholen Sie die Schritte 2 bis 4 fünfundzwanzig (25) Mal. Notieren Sie den Spitze-zu-Spitze-Wert nach jedem Lauf und berechnen Sie den durchschnittlichen Spitze-zu-Spitze-Wert aus den 25 Ergebnissen.
3.2.2 Messung des Zyklus-zu-Zyklus-Jitters
- Aktivieren Sie die Histogrammfunktion in Ihrem Oszilloskop, falls verfügbar.
- Aktivieren Sie die C2C-Funktion in Ihrem Oszilloskop. Wenn diese Funktion nicht verfügbar ist, konfigurieren Sie das Oszilloskop so, dass es zwei aufeinanderfolgende Taktzyklen auf dem Bildschirm erfasst. Subtrahieren Sie die Periode des zweiten Takts von der Periode des ersten Takts und zeichnen Sie den absoluten Wert der Differenz auf.
- Wiederholen Sie den obigen Schritt 1.000 Mal.
- Wenn das Oszilloskop über die Histogrammfunktion verfügt, notieren Sie die Standardabweichung und den Spitzenwert. Wenn die Histogrammfunktion nicht verfügbar ist, berechnen Sie die Standardabweichung und den Spitzenwert aus den 1000 Datensätzen. Der Spitzenwert ist der größte Unterschied zwischen zwei aufeinanderfolgenden Uhren im Datensatz.
- Der Standardabweichungswert ist ziemlich genau. Der Spitzenwert ist jedoch aufgrund seiner Unbegrenztheit nicht sehr genau (siehe Abschnitt 2.1.3). Befolgen Sie den nächsten Schritt, um einen genaueren Spitzenwert zu erhalten.
- Wiederholen Sie die Schritte 2 bis 5 fünfundzwanzig (25) Mal. Notieren Sie den Spitzenwert nach jedem Lauf und berechnen Sie den durchschnittlichen Spitzenwert.
3.2.3 Messung des Langzeitjitters
Methode A
- Konfigurieren Sie das Oszilloskop so, dass es N+1 Taktzyklen auf dem Bildschirm erfasst. N ist Ihre Definition der Anzahl der Taktzyklen, die bei der Langzeit-Jitter-Messung benötigt werden.
- Stellen Sie das Oszilloskop so ein, dass es die Zeit zwischen der Anstiegsflanke des ersten Takts und der Anstiegsflanke des Takts N+1 misst.
- Wiederholen Sie die oben genannten Schritte 1.000 Mal
- Berechnen Sie den Mittelwert, die Standardabweichung und die Spitze-zu-Spitze-Werte aus den 1.000 Proben
- Die Werte für Mittelwert und Standardabweichung sind ziemlich genau. Der Peak-to-Peak-Wert ist jedoch aufgrund seiner Unbegrenztheit nicht sehr genau (siehe Abschnitt 2.1.3). Befolgen Sie den nächsten Schritt, um einen genaueren Spitze-zu-Spitze-Wert zu erhalten.
- Wiederholen Sie die Schritte 1 bis 4 fünfundzwanzig (25) Mal. Notieren Sie den Spitze-zu-Spitze-Wert nach jedem Lauf und berechnen Sie den durchschnittlichen Spitze-zu-Spitze-Wert.
Methode B
- Konfigurieren Sie das Oszilloskop so, dass die steigende Flanke eines Taktzyklus auf dem Bildschirm angezeigt wird.
- Es wird davon ausgegangen, dass die Langzeit-Jitter-Messung N Taktzyklen mit jeweils einer Periode von T ns umfasst. Stellen Sie den Bereich so ein, dass er N*T ns vor der angezeigten Kante auslöst.
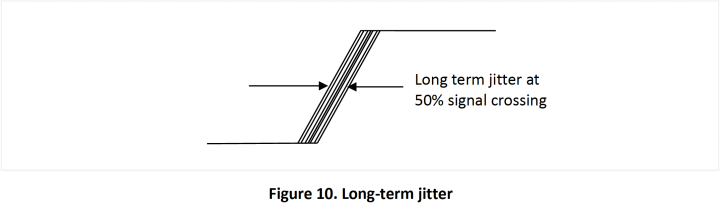
- Aktivieren Sie den Histogrammmodus, um je nach Anwendung die 50 %-Kreuzung der Wellenform 1.000 oder 10.000 Mal zu erfassen. In manchen Bereichen kann dies die Definition vertikaler und horizontaler Schwellenwerte für die Kantenerkennung erfordern; Bitte beachten Sie das Handbuch Ihres Zielfernrohrs.
- Warten Sie, bis die Zieltrefferzahl im Histogramm erfasst ist. Stoppen Sie die Erfassung, sobald die Zielanzahl erreicht ist.
- Auf dem Bildschirm wird die ansteigende Flanke als Linienband angezeigt (siehe Abbildung 10), und die Breite des Bandes gibt den Langzeit-Jitter an.
- Notieren Sie den Mittelwert, die Standardabweichung und die Spitze-zu-Spitze-Werte des Oszilloskops.
- Die Werte für Mittelwert und Standardabweichung sind ziemlich genau. Der Peak-to-Peak-Wert ist jedoch aufgrund seiner Unbegrenztheit nicht sehr genau (siehe Abschnitt 2.1.3). Befolgen Sie den nächsten Schritt, um einen genaueren Spitze-zu-Spitze-Wert zu erhalten.
- Wiederholen Sie die Schritte 3 bis 4 fünfundzwanzig (25) Mal. Notieren Sie den Spitze-zu-Spitze-Wert nach jedem Lauf und berechnen Sie den durchschnittlichen Spitze-zu-Spitze-Wert.
4. Fazit
Dieser Anwendungshinweis dient zwei Zwecken. Zunächst werden die häufigsten Arten von Jitter beschrieben, denen der Leser in heutigen Hochgeschwindigkeitssystemen begegnen kann. Zweitens werden die Verfahren zur Erfassung der verschiedenen Arten von Jitter mithilfe eines Echtzeit-Digitaloszilloskops bereitgestellt. Die Technik zur Messung des Phasenrauschens und damit des Phasenjitters wird im AN10062 Phase Noise Measurement Guide for Oscillators beschrieben.
Tabelle 2. Revisionsverlauf
Ausführung | Veröffentlichungsdatum | Zusammenfassung ändern |
1.11 | 14.05.2009 | Originaldokument |
1.2 | 22.01.2014 | Bearbeitete Gleichung 1 (Pk-Pk- Perioden-Jitter) |
1.21 | 26.04.2019 | Bearbeitete Gleichung 1 (Pk-Pk- Perioden-Jitter) Aktualisierter Perioden-Jitter und Zyklus-zu-Zyklus-Jitter (Abbildung 3 und Abbildung 4) AN10062-Referenz hinzugefügt Aktualisiertes Logo und Firmenadresse, sonstiges Seitenlayout und redaktionelle Änderungen |