用于 LiDAR 的 MEMS计时解决方案
| 设备 | 主要特点 | 核心价值 |
|---|---|---|
单端振荡器 SiT8924 1至110 MHz |
|
|
单端振荡器 SiT9025 1至110 MHz |
|
|
差分振荡器 SiT9396 1至220 MHz SiT9397 220 至 920 MHz |
|
|
高精度TCXO SiT5386 1至60 MHz SiT5387 60至220 MHz |
|
|

1 12 kHz 至 20 MHz 积分范围

完整的MEMS时钟树扩频振荡器 低抖动差分振荡器 32.768 kHz XO 和 TCXO 精密TCXO | 在现实世界条件下最稳健150 fs rms 抖动,出色的 PSNR 耐冲击和振动 在较宽的温度范围内保持稳定 >20亿小时平均无故障时间 | 集成MEMS,易于使用无石英可靠性问题 低温下可靠启动 无需遮盖或屏蔽 任何频率的交货时间都很短 |
LiDAR(光探测与测距)通过用激光瞄准物体并测量反射光返回接收器的时间来确定距离。LiDAR 系统垂直和水平扫描视野,有些甚至可以 360° 扫描,从而创建车辆周围环境的 3D 图像。
LiDAR 系统的核心是固态激光源、探测器和模拟前端 (AFE)。ADC 对 AFE 接收的信号进行采样。经过处理后,LiDAR 系统收集的数据通过 PHY 发送到域控制器或 ADAS 计算机。目前存在许多不同的接口,例如以太网、FPD-Link (TI) 或 GMSL (Analog Devices)。汽车串行器/解串器联盟 (ASA)或MIPI A-PHY等开放标准正在兴起。根据接口的不同,可能需要单端或差分时钟。
| 设备 | 主要特点 | 核心价值 |
|---|---|---|
单端振荡器 SiT8924 1至110 MHz |
|
|
单端振荡器 SiT9025 1至110 MHz |
|
|
差分振荡器 SiT9396 1至220 MHz SiT9397 220 至 920 MHz |
|
|
高精度TCXO SiT5386 1至60 MHz SiT5387 60至220 MHz |
|
|
1 12 kHz 至 20 MHz 积分范围
测量方法有多种:飞行时间 (ToF)、调频连续波或时间数字转换 (TDC)。精确计时对于确保系统精度至关重要。SiT9396 和SiT9397的低抖动特性使其成为 LiDAR 应用模拟部分时钟的理想选择。
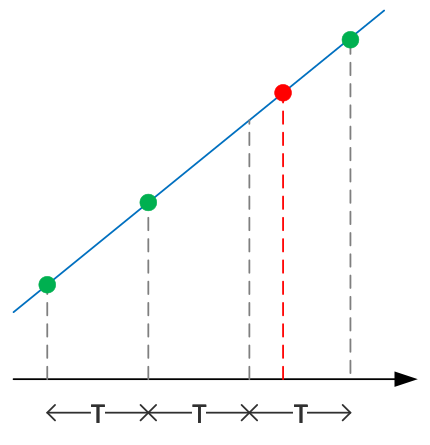
使用 ADC 时,抖动会导致量化误差。当时钟出现过大的抖动时,换句话说,当时钟边沿过早或过晚时,ADC 会在错误的时刻对输入信号进行采样。数据流中的错误值会严重影响系统的功能。
SiTime 硅 MEMS 振荡器拥有卓越的动态性能,有助于系统符合 SOTIF(预期功能安全性)标准。无论环境如何变化,MEMS 振荡器都能确保时钟在整个生命周期内始终符合规格要求。
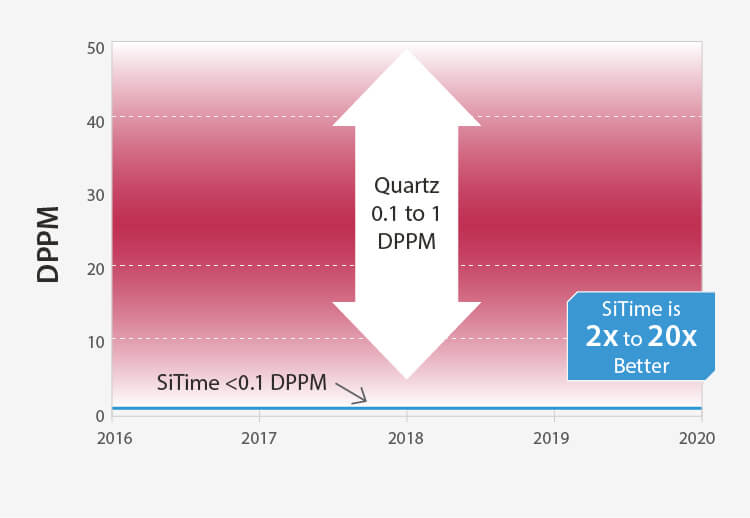
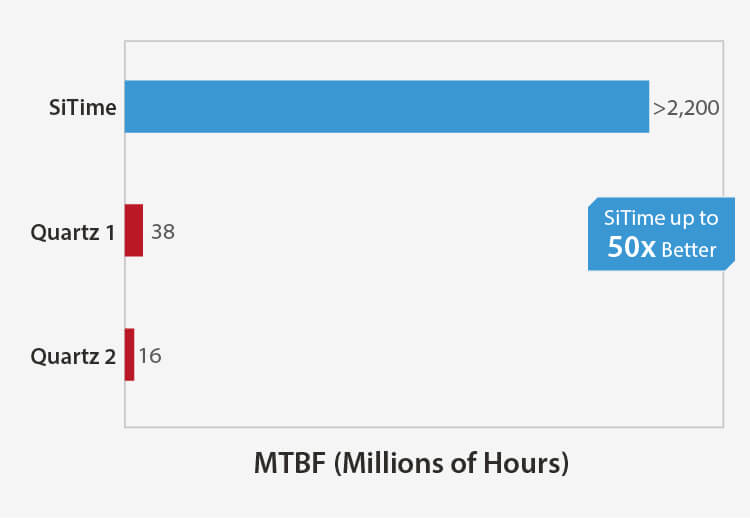
所有 SiTime 器件都比石英体具有以下优势,这对于汽车应用尤为重要:
更高质量 | 更高的可靠性 |
|---|---|
Image
| Image
|
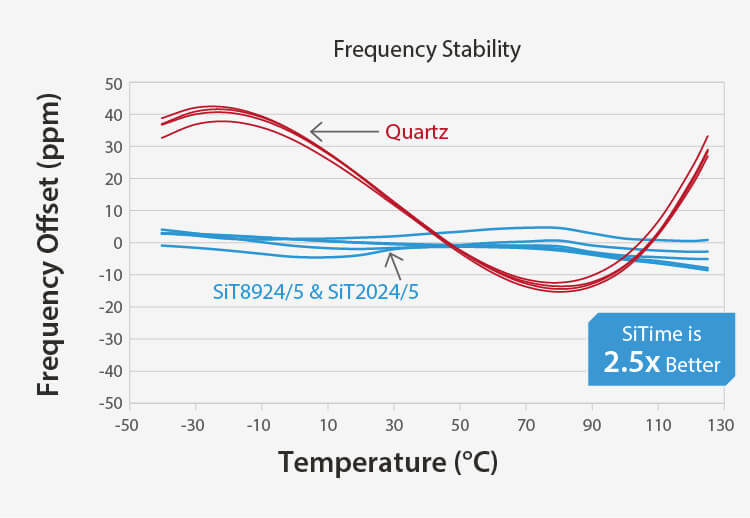
更好的稳定性 | 更好地降低EMI |
|---|---|
Image
| Image
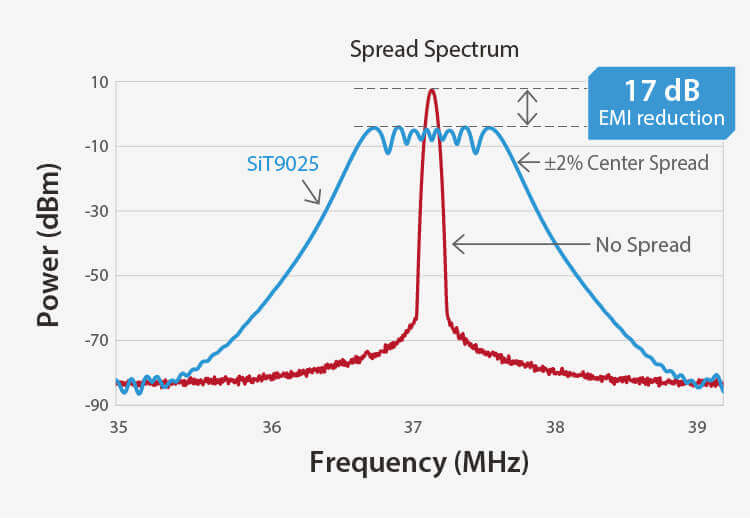
|
不受振动影响 | 更好的噪声抑制 |
|---|---|
Image
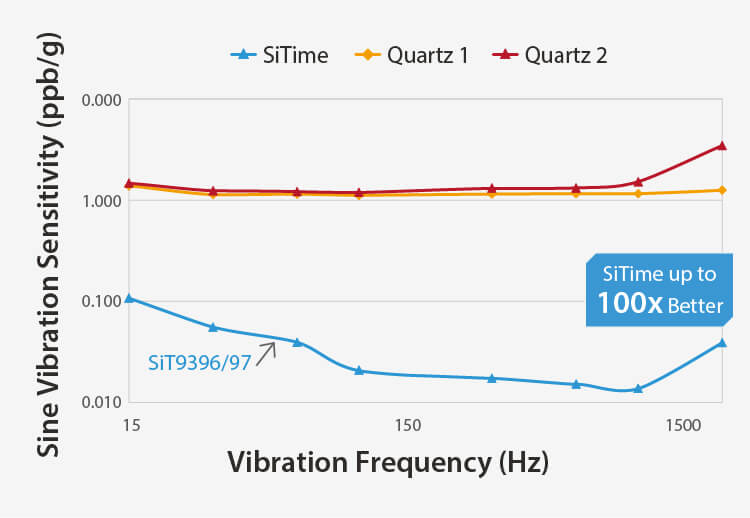
| Image
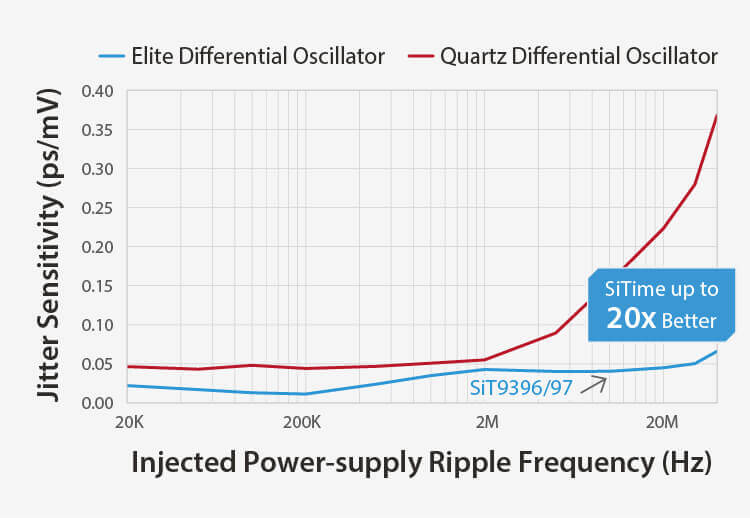
|
