1. はじめに
ジッターは、一連の信号エッジの理想値からのタイミングの変動です。クロック信号のジッターは通常、システム内のノイズやその他の外乱によって引き起こされます。要因としては、熱ノイズ、電源の変動、負荷条件、デバイスのノイズ、近くの回路からの干渉などが挙げられます。
2. ジッターの種類
ジッターはさまざまな方法で測定できます。ジッターの主なタイプは次のとおりです。
- 周期ジッター
- サイクル間の周期ジッター
- 長期ジッター
- 位相ジッター
- タイムインターバルエラー (TIE)
2.1 周期ジッタ
周期ジッターは、ランダムに選択された多数のサイクルにわたる、理想的な周期に対するクロック信号のサイクル時間の偏差です。個別のクロック周期の数が与えられた場合、それぞれを測定し、平均クロック周期、標準偏差、ピークツーピーク値を計算できます。標準偏差とピークツーピーク値は、それぞれ RMS 値と Pk-Pk 周期ジッターと呼ばれることがよくあります。
多くの出版物では、周期ジッターを、測定されたクロック周期と理想的な周期との差として定義しています。実際のアプリケーションでは、理想的な期間を定量化することが難しいことがよくあります。オシロスコープを使用して 100 MHz に設定された発振器からの出力を観察すると、測定された平均クロック周期は 10 ns ではなく 9.998 ns になる可能性があります。したがって、通常は平均期間を理想的な期間として扱う方が現実的です。
2.1.1 周期ジッタのアプリケーション
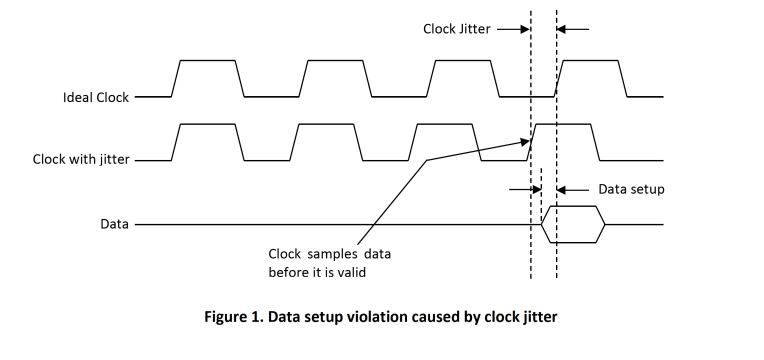
周期ジッターは、デジタル システムのタイミング マージンを計算する際に役立ちます。プロセッサがクロックの立ち上がり前に 1 ns のデータ セットアップを必要とするマイクロプロセッサ ベースのシステムを考えてみましょう。クロックの周期ジッターが -1.5 ns の場合、データが有効になる前にクロックの立ち上がりエッジが発生する可能性があります。したがって、マイクロプロセッサには誤ったデータが表示されます。この例を図 1 に示します。
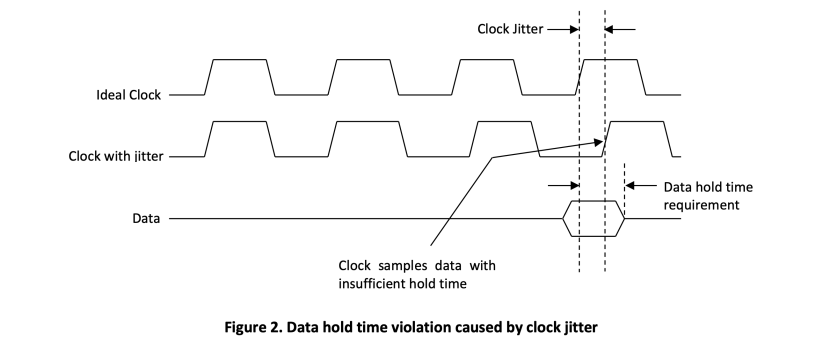
同様に、別のマイクロプロセッサのデータ保持時間要件が 2 ns であるが、クロック ジッターが +1.5 ns である場合、データ保持時間は実質的に 0.5 ns に短縮されます。再び、マイクロプロセッサは間違ったデータを認識することになります。この状況を図 2 に示します。
2.1.2 RMS ジッタからのピークツーピーク ジッタの計算
クロックからの周期ジッターはガウス分布で本質的にランダムであるため、ピコ秒 (ps) 単位の二乗平均平方根 (RMS) 値で完全に表現できます。ただし、セットアップ時間とホールド時間の予算を計算する場合には、ピークツーピーク値の方がより重要です。 RMS ジッターをサンプル サイズ 10,000 のピークツーピーク (Pk-Pk) ジッターに変換するには、リーダーは次の式を使用できます。
𝑃𝑒𝑎𝑘‒ 𝑡𝑜‒ 𝑝𝑒𝑎𝑘 𝑝𝑒𝑟𝑖𝑜𝑑 𝑗𝑖𝑡𝑡𝑒𝑟 = ±3.719 𝑥 (𝑅𝑀 𝑆 𝑗𝑖𝑡𝑡𝑒𝑟) 式 1
たとえば、RMS ジッターが 3 ps の場合、ピークツーピーク ジッターは ±11.16 ps です。
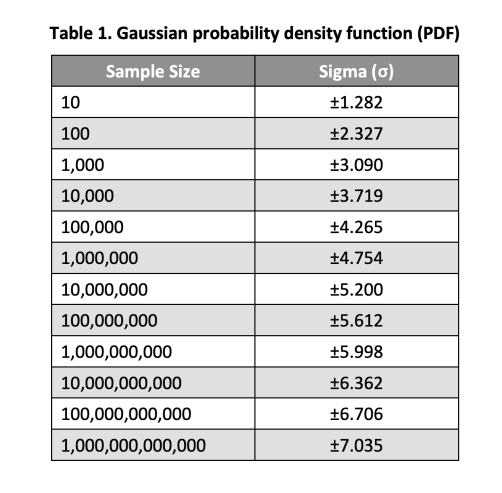
式 1 は、ガウス確率密度関数 (PDF) テーブルから導出されます。たとえば、サンプル サイズが 100 の場合、それらのサンプルのうち 99 個は分布の平均値から ±2.327σ 以内に収まりますが、平均して 1 個のサンプルだけがその領域の外に収まります。 SiTime は、JEDEC 規格で指定されているように、サンプル サイズ 10,000 にわたる RMS 周期ジッターを測定します。
2.1.3 周期ジッタの測定方法
周期ジッターは、JEDEC 規格 65B で、ランダムに選択された多数のサイクルにわたる理想的な周期に対する信号のサイクル タイムの偏差として定義されています。 JEDEC 規格ではさらに、周期ジッターを 10,000 サイクルのサンプルにわたって測定する必要があると規定しています。 SiTime では、次の手順で周期ジッターを測定することを推奨しています。
- 1 クロック サイクルの継続時間 (立ち上がりエッジから立ち上がりエッジまで) を測定します。
- ランダムなクロックサイクル数だけ待機します
- 上記の手順を 10,000 回繰り返します
- 10,000 個のサンプルから平均値、標準偏差 (σ)、およびピークツーピーク値を計算します。
- 上記の測定を 25 回繰り返します。 25 セットの結果から、平均ピークツーピーク値を計算します。
10,000 個のランダム サンプルの測定から計算された標準偏差 (σ) または RMS 値 (ステップ 4) は非常に正確です。 RMS 値の誤差は、次の式を使用して計算できます。

ここで、σn は収集されたサンプルの RMS (またはシグマ)、N はサンプル サイズです。サンプル サイズ 10,000 の場合、ErrorRMS は 0.0071σn です。この誤差はランダムであり、ガウス分布に従います。最悪の場合の測定誤差は通常、±3 ErrorRMS として計算されます。
たとえば、10,000 個のランダム サンプルから計算された RMS 値が 10 ps の場合、ErrorRMS は 0.071 ps となり、この測定の実質的にすべての RMS 値は依然として 10 ± 0.213 ps の狭い範囲内に収まります。実際のアプリケーションでは、10,000 個のサンプル セット内の RMS 誤差は無視できるほど小さいです。
正確な RMS 値はランダムな 10000 サンプル セットから計算できますが、ピークツーピーク値を測定するのはさらに困難です。周期ジッターのランダムな性質により、サンプル サイズが大きいほど、分布曲線の遠端にあるデータ ポイントを取得する確率が高くなります。言い換えれば、より多くのサンプルが収集されるにつれて、ピークツーピーク値は収束するのではなく発散します。これが、より安定した再現性のあるピークツーピーク測定を生成するために、追加のステップであるステップ 5 を追加した理由です。
10,000 個のランダム サンプルを測定するたびに (ステップ 4)、1 つの標準偏差値と 1 つのピークツーピーク値が生成されます。このプロセスをランダムに 25 回繰り返すことで、高い精度で平均ピークツーピーク値を計算できる適切なデータ ポイントのセットを収集できました。このデータから平均 RMS 値を計算することもできますが、これは個々の実行から得られる RMS 値に非常に近くなります。
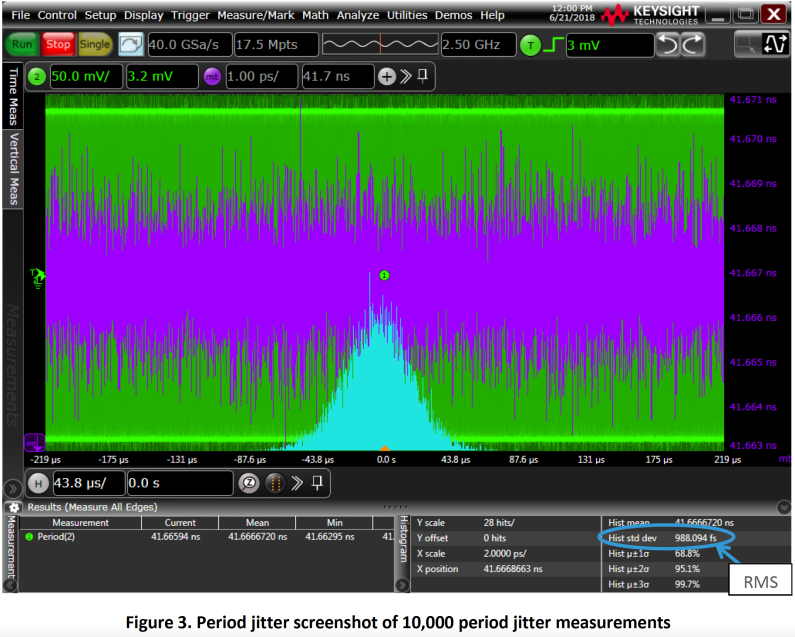
図 3 は、DSA90804A Infiniium 高性能オシロスコープによってキャプチャされた、24 MHz で動作する 3.3 V TCXO 発振器の周期ジッター ヒストグラムと周期トレンドです。これは、10,000 個のサンプルから測定された 1 セットの RMS 値を表します (ステップ 4)。
2.2 サイクル間ジッター
サイクル間 (C2C) ジッターは、JEDEC 規格 65B で、隣接するサイクル ペアのランダム サンプルにおける、隣接するサイクル間の信号のサイクル タイムの変動として定義されています。 JEDEC 標準では、各サンプル サイズが 1,000 以上である必要があるとさらに規定されています。サイクル間のジッターには、連続する 2 つのサイクル間の周期の差のみが関係し、理想的なサイクルについては言及されていないことに注意してください。
サイクル間ジッターは通常、連続する 2 つのクロックの立ち上がりエッジ間の最大偏差を定義するピーク値 (ps) として報告されます。このタイプのジッタ仕様は、一般にスペクトラム拡散クロックの安定性を説明するために使用されます。これは、周期ジッタが周波数拡散機能の影響をより受けやすいのに対し、C2C ジッタは影響を受けないためです。サイクル間のジッターは、ps 単位の RMS 値として表される場合もあります。
2.2.1 サイクル間ジッターの測定方法
SiTime では、次の手順を使用してサイクル間のジッターを測定することをお勧めします。
- 2 つの隣接するクロック サイクル T1 と T2 のサイクル タイムを測定します。
- T1-T2の値を計算します。この数値の絶対値を記録します。
- ランダムなクロックサイクル数だけ待機します
- 上記の手順を 1,000 回繰り返します
- 1,000 個のサンプルから標準偏差 (σ) とピーク値を計算します。ピーク値は、データセット内の最大の絶対値 (T1-T2) 数値です。
- 上記の測定を 25 回繰り返し、25 セットの結果から平均ピーク値を計算します。
ピークツーピーク周期ジッターと同様に、サイクル間ジッターのピーク値も、より多くのサンプルが取得されるにつれて収束せずに発散します。 25 個のサンプル セットから平均ピーク C2C ジッターを取得するために、手順のステップ 6 が追加されます。
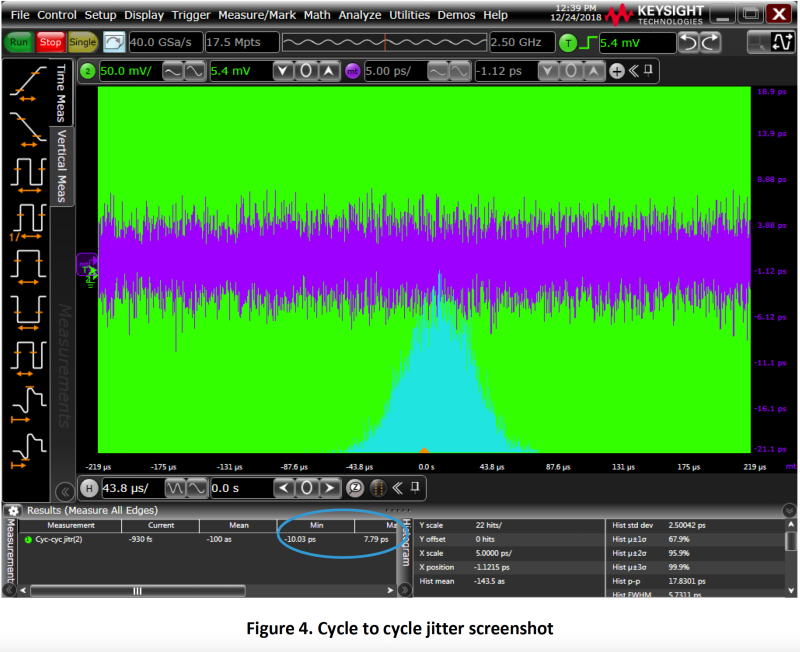
図 4 は、サイクル間のジッターのヒストグラムと期間の傾向の例です。この場合、サイクル間ジッターのピークは 10.03 ps です (2 つの数値の大きい方: -10.03 ps と 7.79 ps を絶対形式で表します)。
2.3 長期ジッター
長期ジッターは、連続する数サイクルにわたる、理想的な位置からのクロック出力の変化を測定します。測定に使用される実際のサイクル数はアプリケーションによって異なります。長期ジッターは、長期間にわたるクロック サイクルの連続ストリームに対するジッターの累積的な影響を表すため、周期ジッターやサイクル間ジッターとは異なります。このため、長期ジッターは累積ジッターと呼ばれることがあります。長期ジッターは通常、グラフィックス/ビデオ ディスプレイや距離測定器などの長距離テレメトリ アプリケーションで役立ちます。
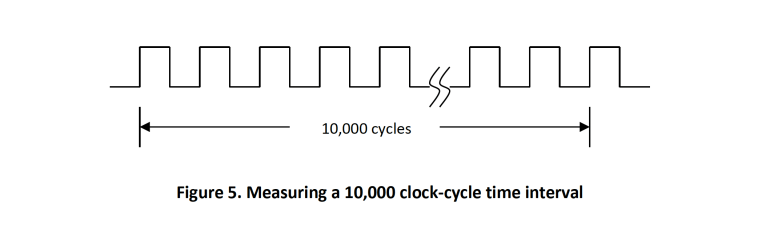
SiTime では、次の方法を使用して長期ジッターを測定することを推奨しています。この例では、10,000 クロックにわたる長期ジッターを測定します。
- 図 5 に示すように、連続 10,000 クロック サイクルの時間間隔を測定します。
- ランダムなクロックサイクル数だけ待機します
- 上記の手順を 1,000 回繰り返します
- 1,000 個のサンプルから平均値、標準偏差 (σ)、およびピークツーピーク値を計算します。
- 上記の測定を 25 回繰り返します。 25 セットの結果から、平均ピークツーピーク値を計算します。
もう一度言いますが、ステップ 5 は、ピークツーピーク値の制限のない性質を克服するために必要です。
2.4 位相ジッター
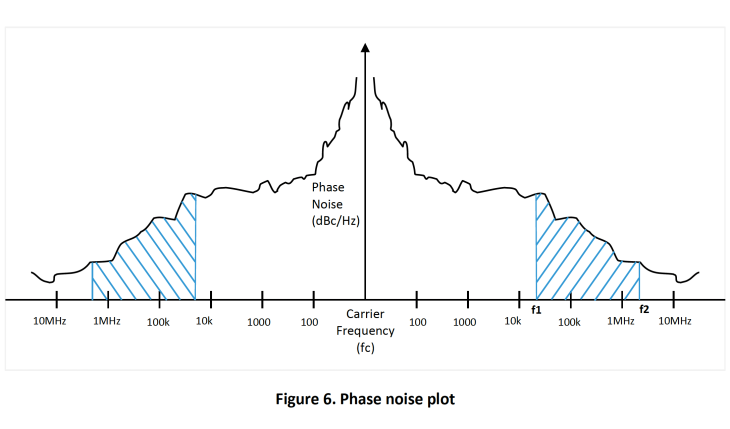
位相ノイズは通常、さまざまな周波数オフセットでの一連のノイズ値 (例: 20 kHz で -60 dBc/Hz、10 MHz で -95 dBc/Hz)、または周波数範囲にわたる連続ノイズ プロットとして説明されます。位相ジッターは、特定のスペクトルにわたる位相ノイズの積分であり、秒単位で表されます。
方形波では、ほとんどのエネルギーは搬送周波数にあります。ただし、一部の信号エネルギーは、搬送波の両側の周波数範囲にわたって「漏洩」します。位相ジッターは、搬送波 (fc) に対する 2 つのオフセット周波数間に含まれる位相ノイズ エネルギーの量です。図 6 は、フィルタされていない位相ノイズのプロットであり、影付きの領域は周波数 f1 と f2 の間の位相ジッターを表しています。
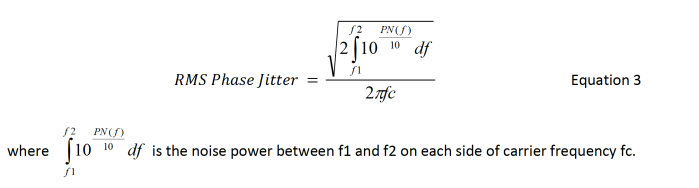
f1 と f2 の間の RMS 位相ジッターは式 3 で定義されます。
通信アプリケーションでは、最終的な RMS 位相ジッター値が計算される前に、TX PLL と RX PLL を組み合わせたバンドパス フィルター効果が生の位相ノイズ データに適用されます。以下は、一般的なアプリケーションと、それに関連するフィルターの帯域幅 (コーナー周波数) です。
- SONET OC-48: 12 kHz ~ 20 MHz
- ファイバーチャネル: 637 kHz ~ 10 MHz
- SATA/SAS: 900 kHz ~ 7.5 MHz
- 10 ギガビット イーサネット XAUI: 1.875 MHz ~ 20 MHz
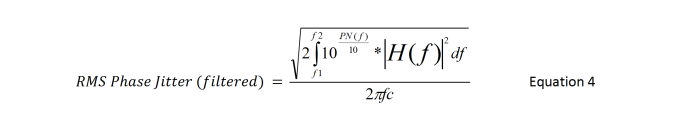
フィルター関数が H(f) の場合、フィルターされた RMS 位相ジッターは式 4 を使用して計算できます。
2.5 タイムインターバルエラー (TIE)
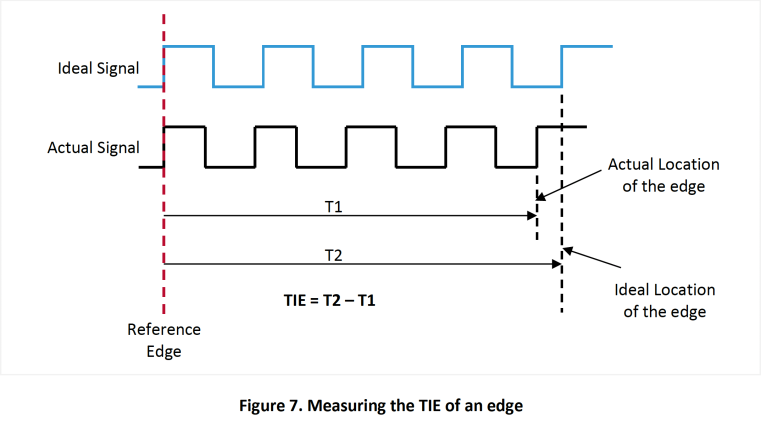
エッジの時間間隔誤差 (TIE) は、基準点から測定された理想的な位置からのエッジの時間偏差です。実際、TIE は、秒またはピコ秒で表される位相ノイズの離散時間領域表現です。図 7 は、TIE の基本概念を示しています。理想的な信号は、多くの場合、信号周期の平均推定値からソフトウェアで作成された信号です。
2.5.1 TIE の経時的なプロット
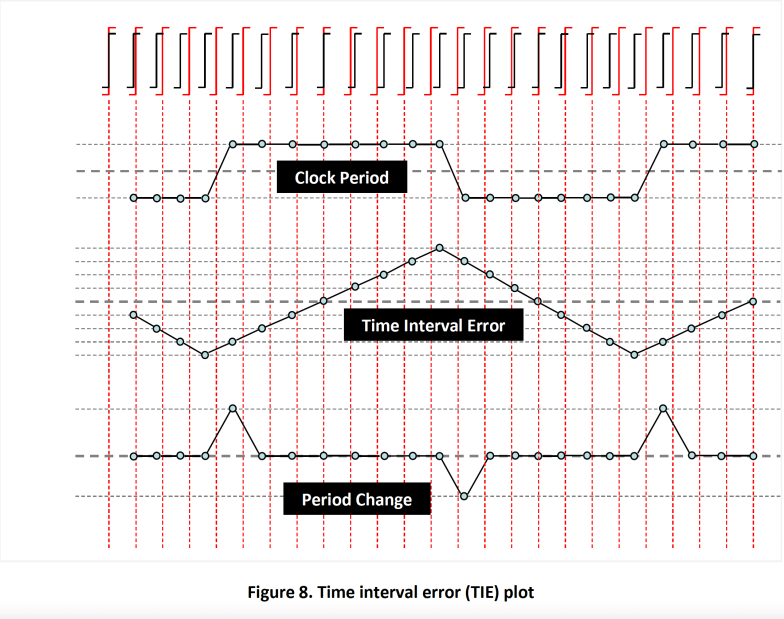
図 8 の上部にクロック波形を示します。赤色のパルスは、持続時間が正確に 1000 ps で、完全にタイミングが調整されたクロック サイクルです。黒のパルスはジッターのあるクロック サイクルです。これらのクロック パルスの後縁は、プレゼンテーションを強化するために削除されています。シーケンスの開始時に、赤と黒の両方のクロックが互いに位置合わせされます。ジッターにより、黒のクロック エッジが時間とともにシフトし始め、赤のクロック エッジより前に発生する場合もあれば、後に発生する場合もあります。
「クロック周期」とラベル付けされたプロットは、時間の経過に伴う測定されたブラック クロック周期を表します。この例では、ブラック クロック周期は 990 ps または 1010 ps です。 「期間の変化」プロットは、前のサイクルからの各サイクルの変化を示します。このグラフは、2 つの連続するブラック クロック間の期間が同じである限り、平坦なままです。ただし、期間の差が検出されるたびに変更が記録されます。
たとえば、最初の 4 クロック サイクルの周期は 990 ps で一定であるため、「周期変化」プロットは平坦になります。しかし、5 番目のクロックの周期が 990 ps から 1010 ps に延長されると、プロットは +20 ps の位置にジャンプしてこの変化を報告します。言い換えれば、このプロットは、「クロック周期」プロットに示されている周期の変化を識別します。
「時間間隔誤差」(TIE) プロットは、理想的なエッジ (赤いクロック) と実際のエッジ (黒いクロック) の間の累積誤差を記録します。この例では、最初の 4 クロックがそれぞれ理想的な周期よりも 10 ns 短いため、TIE プロットは負の方向に向かって移動し始めます。ジッター エラーが -40 ps 蓄積された後、5 番目のクロック周期が理想的な周期より 10 ps 長いため、プロットは 5 番目のクロックで方向を変え、正の方向に向かいます。
TIE 測定は、送信されたデータ ストリームの動作を調べる場合に特に役立ちます。基準クロックは通常、クロック/データ リカバリ (CDR) 回路を使用してデータ信号から回復されます。 TIE 値が大きい場合は、CDR の PLL がデータ ストリームの変化するビット レートに応答するのが遅すぎることを示している可能性があります。
3. リアルタイムデジタルオシロスコープによるジッター測定
3.1 オシロスコープのセットアップガイドライン
クロック ジッターの測定に使用される最も一般的な機器は、リアルタイム デジタル オシロスコープ (スコープ) です。このセクションには、ジッター測定精度を向上させるための一般的なスコープ設定ガイドラインが含まれています。
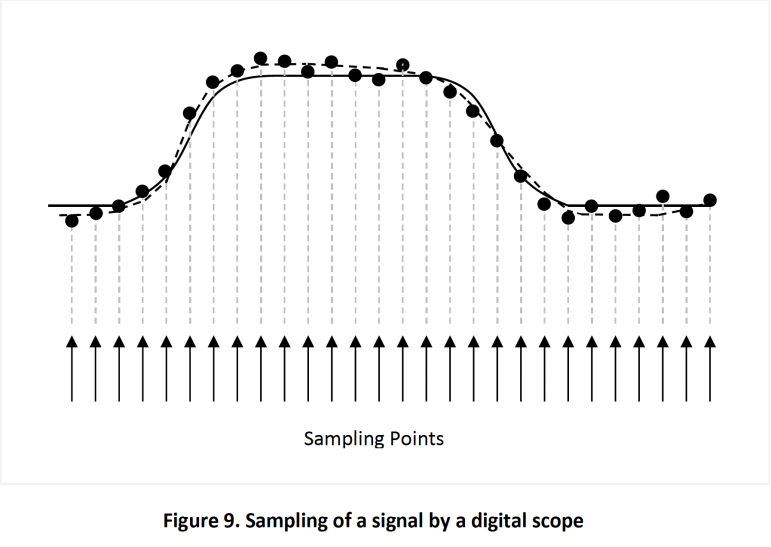
デジタル スコープは内部タイム ベースを使用して、定期的な間隔で入力をサンプリングします。サンプリング レートの範囲は、ハイエンド ユニットの場合、1 Gsps (ギガ サンプル/秒) から 40 Gsps です。図 9 は、デジタル スコープが入力に与えられた信号をサンプリングして表示する方法を示しています。図の下部の矢印はサンプリング ポイントを表し、実線は実際の信号、点はサンプリングされた値です。スコープによって表示される信号 (点線で表示) は、サンプリングされた点全体にわたる最適曲線です。
読者は、サンプリングされた値が実際の信号の値と必ずしも一致しないことに気づくかもしれません。これらの不一致は、スコープ内の量子化エラーによって引き起こされます。これらのエラーのほとんどは、スコープの設計とコストのトレードオフに固有のものですが、スコープを適切に設定すれば、不正確さの一部を軽減できます。次のセクションでは、これらのエラーの主な原因を調査し、ジッター測定への影響を軽減するための推奨手順を説明します。
3.1.1 フロントエンドアンプのノイズ
デジタル スコープへの入力は、アナログ デジタル コンバータ (ADC) によってデジタル化される前に、アナログ アンプを通過します。このアンプによって生成されるノイズはオシロスコープの入力帯域幅に比例します。帯域幅が広いほど、ノイズは大きくなります。ただし、帯域幅を縮小しすぎると、サンプリングされた信号の立ち上がり時間と立ち下がり時間に影響が生じ、ジッター測定に重大な誤差が生じます。
立ち上がり時間/立ち下がり時間と信号エッジの帯域幅の関係を表す一般式は次のとおりです。

ここで、立ち上がり時間 (または立ち下がり時間) は、信号エッジの 20% ポイントと 80% ポイントの間で測定されます。 SiTime では、スコープの帯域幅を信号の帯域幅の 3 倍に設定することをお勧めします。一部のスコープでは、最大サンプリング レートが選択されている場合にのみ帯域幅を設定できます。他のスコープでは、帯域幅をまったく選択できない場合があります。
3.1.2 垂直ゲイン設定による量子化ノイズ
量子化誤差は、サンプリングされた値とサンプリング点での信号の実際の値との差です。このエラーを図 9 に示します。スコープ内のこのエラーの一部は、ディスプレイの垂直ゲイン設定によって発生します。垂直ゲインが小さい値に設定されている場合、オシロスコープは内部 ADC の最大分解能を利用できない可能性があります。
SiTime では、信号がディスプレイの高さ全体を満たすまでスコープの垂直ゲイン コントロールを調整することをお勧めします。一部のスコープでは、垂直ゲインをさらに 1 ノッチ上げて、信号の一部がディスプレイの上部と下部の両方でクリップされるようにすると、量子化誤差をさらに減らすことができます。この利点は、垂直ゲイン設定を高くすると、オシロスコープが ADC 内の余分なビットを利用して信号をデジタル化する可能性があるため実現されます。ただし、この機能はスコープに依存するため、スコープのマニュアルを参照してください。
3.1.3 低いサンプリングレートによる量子化ノイズ
前のセクションで説明した量子化ノイズの一部は、水平軸に沿ったサンプリング ポイントが不十分であることが原因で発生します。 SiTime では、立ち上がりエッジまたは立ち下がりエッジの 20% ~ 80% ポイントの間に少なくとも 3 つのサンプリング ポイントを設けることをお勧めします。この推奨事項は、スコープの最小サンプリング レート要件に変換されます。たとえば、信号の立ち上がり時間 (20% ~ 80%) が 1 ns で、この時間枠内に 4 つのサンプリング ポイントが必要な場合、オシロスコープのサンプリング レートは 4 Gsps よりも優れている必要があります。スコープのサンプリング レートが上記の最小要件よりも高い場合は、最高のサンプリング設定を選択します。
3.1.4 タイムベースジッター
デジタル スコープのサンプリング ポイントは、内部タイム ベースによって生成されます。クロック ソースとしてのタイム ベースには独自のジッター特性があり、信号のジッター測定誤差の原因となります。一般に、3% を超える精度でジッター測定をサポートするには、タイムベース ジッターを予想される信号ジッターの 25% 未満に抑える必要があります。 SiTime では、ハイエンドのユニットはジッターが低く、より優れたタイムベース回路を備えている傾向があるため、実験室で利用可能な最高のオシロスコープを使用してジッター測定を実行することをお勧めします。
3.2 リアルタイムデジタルスコープを使用したジッタ測定手順
3.2.1 周期ジッタの測定
方法A
- 最初のクロックだけを測定するのではなく、サンプリングされたすべてのクロック周期を測定するようにスコープを構成します。
- 画面上で 10,000 クロック サイクルをキャプチャするようにスコープを構成します。たとえば、100 MHz クロックの場合、10K サイクル = 100 us です。通常、ディスプレイには 10 の水平分割が含まれるため、水平制御は 1 分割あたり 10 us に設定する必要があります。
- スコープによって報告された平均値、標準偏差、およびピークツーピーク値を記録します。
- 平均値と標準偏差の値は非常に正確です。ただし、ピークツーピーク値は無制限であるため、あまり正確ではありません (セクション 2.1.3 を参照)。より正確なピークツーピーク値を取得するには、次の手順に従ってください。
- ステップ 2 と 3 を 25 回繰り返します。各実行後のピークツーピーク値を記録し、25 件の結果から平均ピークツーピーク値を計算します。
方法B(JEDEC方式)
- 最初のクロックの周期を測定するようにスコープを構成し、可能な場合はヒストグラム機能をオンにします。
- 画面上の単一クロック サイクルをキャプチャするようにスコープを構成します。
- 上記の手順を 10,000 回繰り返します。
- スコープによって報告された平均値、標準偏差、およびピークツーピーク値を記録します。
- 平均値と標準偏差の値は非常に正確です。ただし、ピークツーピーク値は無制限であるため、あまり正確ではありません (セクション 2.1.3 を参照)。より正確なピークツーピーク値を取得するには、次の手順に従ってください。
- ステップ 2 ~ 4 を 25 回繰り返します。各実行後のピークツーピーク値を記録し、25 件の結果から平均ピークツーピーク値を計算します。
3.2.2 サイクル間ジッターの測定
- 使用可能な場合は、スコープのヒストグラム機能をオンにします。
- スコープで C2C 機能をオンにします。この機能が利用できない場合は、画面上の 2 つの連続するクロック サイクルをキャプチャするようにスコープを設定します。最初のクロックの周期から 2 番目のクロックの周期を減算し、その差の絶対値を記録します。
- 上記の手順を 1,000 回繰り返します。
- スコープにヒストグラム機能がある場合は、標準偏差とピーク値を記録します。ヒストグラム機能が利用できない場合は、1000 個のデータ セットから標準偏差とピーク値を計算します。ピーク値は、データ セット内の連続する 2 つのクロック間の最大の差です。
- 標準偏差値は非常に正確です。ただし、ピーク値は無制限であるため、あまり正確ではありません (セクション 2.1.3 を参照)。より正確なピーク値を取得するには、次の手順に従ってください。
- ステップ 2 ~ 5 を 25 回繰り返します。各実行後のピーク値を記録し、平均ピーク値を計算します。
3.2.3 長期ジッターの測定
方法A
- 画面上の N+1 クロック サイクルをキャプチャするようにスコープを構成します。 N は、長期ジッター測定に必要なクロック サイクル数の定義です。
- 最初のクロックの立ち上がりエッジとクロック N+1 の立ち上がりエッジの間の時間を測定するようにスコープを設定します。
- 上記の手順を 1,000 回繰り返します
- 1,000 個のサンプルから平均値、標準偏差、ピークツーピーク値を計算します。
- 平均値と標準偏差の値は非常に正確です。ただし、ピークツーピーク値は無制限であるため、あまり正確ではありません (セクション 2.1.3 を参照)。より正確なピークツーピーク値を取得するには、次の手順に従ってください。
- ステップ 1 ~ 4 を 25 回繰り返します。各実行後のピークツーピーク値を記録し、平均ピークツーピーク値を計算します。
方法B
- 画面上にクロック サイクルの立ち上がりエッジを表示するようにスコープを設定します。
- 長期ジッター測定には、それぞれの周期が T ns の N クロック サイクルが含まれると仮定します。表示されたエッジの N*T ns 前にトリガーするようにスコープを設定します。
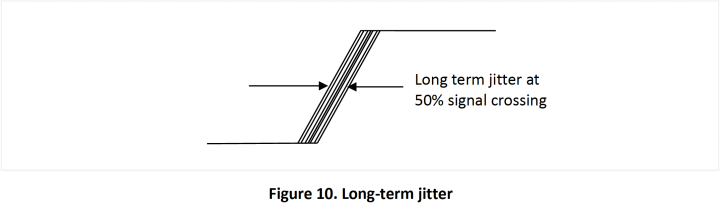
- ヒストグラム モードをオンにして、アプリケーションの必要に応じて波形の 50% 交差を 1,000 回または 10,000 回キャプチャします。一部の範囲では、エッジ検出のために垂直および水平のしきい値を定義する必要がある場合があります。スコープのマニュアルを参照してください。
- 目標ヒット数がヒストグラムに記録されるまで待ちます。目標数に達したらすぐに取得を停止します。
- 画面には立ち上がりエッジが線の帯として表示され (図 10 を参照)、その帯の幅が長期ジッターになります。
- スコープからの平均値、標準偏差、およびピークツーピーク値を記録します。
- 平均値と標準偏差の値は非常に正確です。ただし、ピークツーピーク値は無制限であるため、あまり正確ではありません (セクション 2.1.3 を参照)。より正確なピークツーピーク値を取得するには、次の手順に従ってください。
- ステップ 3 ~ 4 を 25 回繰り返します。各実行後のピークツーピーク値を記録し、平均ピークツーピーク値を計算します。
4. 結論
このアプリケーション ノートには 2 つの目的があります。まず、今日の高速システムで読者が遭遇する可能性のある一般的なタイプのジッターについて説明します。 2 番目に、リアルタイム デジタル オシロスコープを使用してさまざまなタイプのジッターを捕捉する手順を提供します。位相ノイズとそれに伴う位相ジッターの測定手法については、「AN10062発振器用位相ノイズ測定ガイド」に説明されています。
表 2. 改訂履歴
バージョン | 発売日 | 変更の概要 |
1.11 | 2009 年 5 月 14 日 | オリジナルのドキュメント |
1.2 | 2014/01/22 | 編集された式 1 (Pk-Pk周期ジッター) |
1.21 | 2019/04/26 | 編集された式 1 (Pk-Pk周期ジッター) 更新された周期ジッターとサイクル間ジッター (図 3 および図 4) AN10062 リファレンスを追加 ロゴと会社住所を更新、その他のページレイアウトと編集上の変更 |