E/E アーキテクチャの将来とクロックへの影響
自動車が車輪上のコンピューターになりつつあるため、自動車の電気電子 (E/E) アーキテクチャは劇的に変化しました。消費者は高度な安全機能を期待し、豊富な車載技術を求めています。これらすべてが自動車の電動化とコネクティビティの急速な増加を推進しています。
電子制御ユニット (ECU)
E/E アーキテクチャの中心となるのは一連の電子制御システム (ECU)であり、各 ECU は 1 つ以上の車両システムを制御する組み込みシステムです。一般的な ECU には、エンジン、ドライブトレイン、またはトランスミッション制御が含まれます。 HVAC 制御。インフォテイメントとテレマティクス。最新の車両では、センサーからアクチュエーターに至るまで、ドライバー支援と自動運転に関連するすべてのシステムが ECU によって制御されます。これらの ECU は車両通信ネットワークを介して相互接続されています。
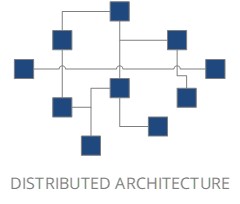
自動車 ECU の歴史は、エレクトロニクスが初めて車両に登場したときに遡ります。初期の頃、各コントロールユニットはエンジン制御、ABS システム、HVAC などの特定の機能に限定されていました。車両に追加される機能が増えるにつれて、ECU の数も増加し、一部の高級車では最大 200 個に達しました。 ECU は通常、低速 CAN、LIN、または同様のバスによって相互接続されていました。この車両アーキテクチャは分散アーキテクチャとして知られています。分散型 ECU は通常シンプルであり、正確なタイミングに対する要件はほとんどありません。データリンクが遅かった。 ECU のクロックを供給するには、水晶または不正確な RC 発振器でも十分でした。
時間の経過とともに、より高度な機能が自動車に設計されるにつれて、ECU の数が増加してきました。この ECU の数の増加は、コストが高く、配線が重大な課題となっていました。しかし同時に、プロセッサー技術も向上し、1 つのコントローラーで複数の機能を管理できるようになり、本質的にドメイン内の ECU の統合が可能になりました。そこで、ドメイン アーキテクチャが誕生しました。
ドメインのアーキテクチャ
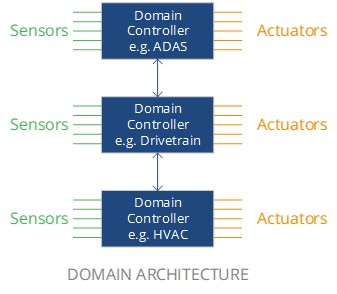
ドメイン アーキテクチャでは、各 ECU が特定のドメインを管理します。各ドメイン コントローラーは、その機能領域に関連するセンサーとアクチュエーターに接続されています。一般的な車両アーキテクチャには、次のドメイン コントローラーが搭載されています。
- 接続性/テレマティクス
- 自動運転・運転支援システム(AD/ADAS)
- パワートレイン/車両ダイナミクス
- ボディと快適さ
- 車載体験/インフォテインメント
ドメイン アーキテクチャへの移行はタイミングに大きな影響を与えます。
- このアーキテクチャは、より高速なインターフェイスに依存しています。これは、イーサネット、FPDLink、GMSL、および同様のインターフェイスによって実現されます。高速インターフェイスが正しく機能するには、低ジッター クロックが必要です。過剰なジッターは、バス上のビット誤り率 (BER) を増加させます。多くの場合、高いクロック精度と温度に対する安定性 (つまり、低い ppm) が重要です。
- ECU の複雑さが増大したため、より多くのクロックが必要になります。一部のドメイン コントローラー、特に AD/ADAS は、複数のプロセッサー (メイン SoC やビジョン コプロセッサーなど) 上に構築されており、すべて PCI-Express によって相互接続されています。 2022 年に車載システムで広く使用される PCI-Express Gen 4 では、ジッターが 500 fs 未満の 100 MHz 差動クロック (12 kHz ~ 20 MHz で統合) が必要です。低ジッターSiT9396 発振器は、このクロックの生成に最適です。
- 統合されたクロック ジェネレーターは、基板スペース、消費電力、EMI などの他の設計パラメータを最適化しながら、部品表を合理化します。クロックジェネレータの詳細については、SiTime にお問い合わせください。
- 機能安全は、今日の自動車システムに不可欠な部分です。 ASIL D は、ほとんどのドメイン コントローラーで必須です。クロックは、機能安全要件をサポートする上で重要な役割を果たします。
ゾーンアーキテクチャでさらに前進
ドメイン アーキテクチャと同様に効率的かつエレガントであるため、提案されたゾーン アーキテクチャは、自動車電子システムをさらに最適化する方法を表します。ここでは、センサーとアクチュエーターは、その機能に関係なく、ローカルのゾーン コントローラーまたはゲートウェイに接続されます。将来の E/E アーキテクチャは、非常に強力な集中コンピュータに接続されたいくつかのコントローラで構成されます。このアーキテクチャには、配線をさらに削減し、計算能力を最適化できる可能性があります。ゾーン コントローラーは、前処理タスクを実行することで中央コンピューターの負荷を軽減することもできます。
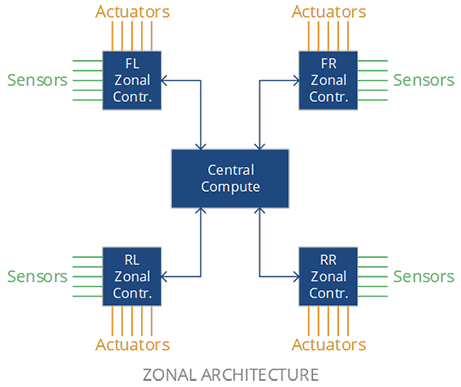
ゾーン アーキテクチャは高速インターフェイスに大きく依存しています。タイミングに関して課される要件は、ドメイン アーキテクチャよりもさらに厳しくなり、さらに低いジッター クロック、より高いタイミング精度、および温度に対する安定性の向上が求められます。
SiTime の MEMS タイミング ソリューションがどのように役立つか
SiTime MEMS タイミング ソリューションは、今日の E/E アーキテクチャと将来のゾーン指向アーキテクチャに必要なパフォーマンスを提供します。クォーツベースのタイミング コンポーネントと比較して、SiTime デバイスには、車載アプリケーションにとって特に重要ないくつかの利点があります。
- より優れた周波数精度、10 分の 1 の低エージング、および優れた温度安定性 – 最小 ±20 ppm (XO デバイス) (-40 ~ +125 °C の範囲)、±0.1 ppm (TCXO デバイス) (-40 ~ +105 °C の範囲)。
- 信頼性が最大 50 倍向上。現場での故障の量を減らすこととは別に、信頼性の向上は FIT 率の低下につながります。これにより、機能安全評価の一部として必要な定量的分析である、FMEDA におけるより優れたハードウェア安全性メトリクスが提供されます。
- MEMS 共振器は水晶に比べてサイズが小さく質量が軽いため、衝撃、振動、電磁干渉に対する耐性が 100 倍優れています。水晶に永久的な損傷を与えていない場合でも、衝撃や振動によって水晶発振器にジッターが誘発され、高速リンクのビット エラー レートに悪影響を与える可能性があります。
................................................................... ......
注目の車載用MEMS発振器
関連性のあるコンテンツ
メールアドレスを入力して最新情報を入手してください。
メディア連絡先
pr@sitime.com